2020 X-Corps Festival에서 대상 수상
소프트 로봇 분야를 위한 촉각의 다방면 적용 가능성 제시
2020 X-Corps Festival에서 정훈진(융합전자공학부 4), 김재훈(융합전자공학부 4), 서호준(융합전자공학과 박사과정) 씨로 구성된 그래스프팀이 대상을 수상했다. 2020 X-Corps Festival은 한국연구재단이 주관하는 현장맞춤형 이공계 인재양성 사업으로, 연구팀의 연구성과를 공유하고 우수성과에 대해 시상하는 축제다.
졸업을 앞둔 정 씨와 김 씨. 그들은 졸업 작품을 위해 이승백 융합전자공학부 교수를 찾아갔고 소프트 로봇을 연구하게 됐다. 그러던 중 정 씨와 김 씨는 연구 비용을 지원해 준다는 X-Corps 사업 소식을 접했고, 이 교수와 의논 끝에 보다 완성도 있는 연구 결과를 도출하기 위해 해당 사업에 참여했다.
정 씨와 김 씨는 의료용 집게나 수술용 로봇 손가락을 사람의 손가락처럼 촉각을 통해 동작을 제어할 수 있도록 연구를 진행했다. 해당 연구를 통해 빛이 없는 환경에서 동작이 어려운 기존의 물체 인식 방법을 촉각 센서 신호를 통해 극복하고자 한 것이다. 또 금속 재질의 로봇 손가락의 경우 체내 삽입 시 인체 내부에서 동작이 자유롭지 못해 체내 손상을 야기할 수 있는데, 유연한 실리콘 재질로 로봇 손가락을 제작해 기존의 문제점을 해결하고자 했다.
그래스프팀의 팀장으로 활동한 서 씨의 주도 아래 정 씨와 김 씨는 지난 4월부터 본격적으로 연구에 착수했다. 그들은 연구 계획부터 유연 집게 설계 및 제작, 촉각 센서 선정 및 삽입, 촉각 센서 출력 신호 수집을 위한 판독 집적회로 구현, 유연 집게 제어 및 센서 신호 수집 처리를 위한 마이크로컨트롤러 코드 작성을 단계적으로 진행해 나갔다.
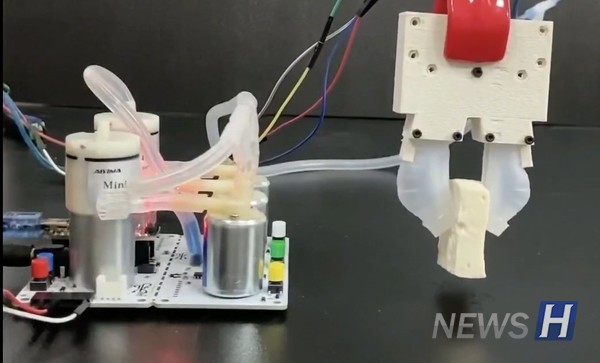
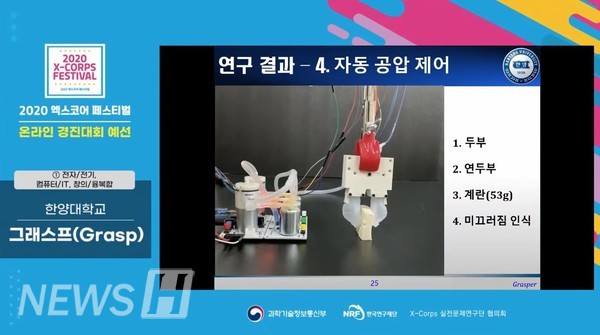
정 씨와 김 씨는 이 교수와 산업체 멘토, 팀장의 도움으로 좋은 연구 성과를 얻을 수 있었다. 그들은 촉각 센서 신호를 기반으로 공압을 통해 동작을 제어할 수 있는 유연 집게를 개발해 유연한 움직임을 가능하게 했고 체내 손상의 문제점을 해결했다. 단일압전센서 출력 신호 분석을 기반으로 로봇 손가락이 스스로 구부리기, 만지기, 악력 등을 인식할 수 있게 했다. 만일 집은 물체가 미끄러져 빠지게 되면 이를 인식하고 더 큰 힘으로 잡게끔 시스템을 설계했다.
그래스프팀은 유연 집게 개발로 2020 X-Corps Festival에서 대상을 수상했다. 도토리묵, 연두부를 어떠한 손상도 없이 유연 집게가 스스로 판단해 조작하는 결과를 보여줌으로써 좋은 평가를 받았다. 다만 부드러운 재질로 로봇을 구성해 뼈대가 있는 로봇에 비해 인가할 수 있는 힘이 비교적 약하다. 또 인체 내부에 삽입 가능한 크기로 소형화하는 일이 남아있다. 그래스프팀은 해당 문제와 과제를 해결하기 위해 후속 연구를 진행 중이다.
끝으로 정 씨는 “좋은 사업을 통해 자신이 원하던 연구를 할 수 있어 기쁘다”며 “연구에 관심 있는 학부생이 이 사업을 통해 앞으로의 진로 설정에 많은 도움을 받으면 좋겠다”고 수상 소감을 말했다. 김 씨는 지도해준 교수와 팀장 서 씨, 그리고 팀원 정 씨에게 감사를 표했다. 서 씨는 “사전에 진행된 교내 HX-Corps 결과발표회에서 우수한 성과를 도출해 X-Corps Festival 출전 자격을 얻을 수 있었다”며 “연구 결과를 좋게 봐준 심사위원에게 감사하다”고 소감을 덧붙였다.
 '한양위키' 키워드 보기
'한양위키' 키워드 보기