On September 22, a 해외 토토사이트 운영 team led by Professor Choi Jung-wook of the Department of Electronic Engineering at Hanyang University announced that the team has developed a novel learning framework, Saliency-Aware Quantized Imitation Learning(SQIL), that dramatically enhances the efficiency of AI models handling complex control challenges such as robotic manipulation and autonomous driving.
The study focused on enabling large-scale Vision-Language-Action(VLA) models to operate at higher speed and with lower power consumption while preserving accuracy in real-world environments such as robotic arm manipulation.
Traditional large-scale VLA models can integrate visual and linguistic information to perform complex manipulation, but their billions of parameters come with immense computational and memory costs. Quantization techniques, widely adopted to alleviate these burdens by reducing the numerical representation of models, improve efficiency but suffer from a critical limitation. Mission-critical states are specific conditions that determine the success or failure of robotic tasks, and in such states, quantization often significantly degrades performance, leading to failures in finishing tasks.
To overcome this issue, Professor Choi's team proposed two key innovations. First of all, identify critical states in robotic control automatically using the State Importance Score(SIS), which will directly influence task success, and then carry out reinforcement learning to let quantized models make the same decisions as full-precision models in those critical states using the Quantization-Robust Action Distillation(QRD) method.
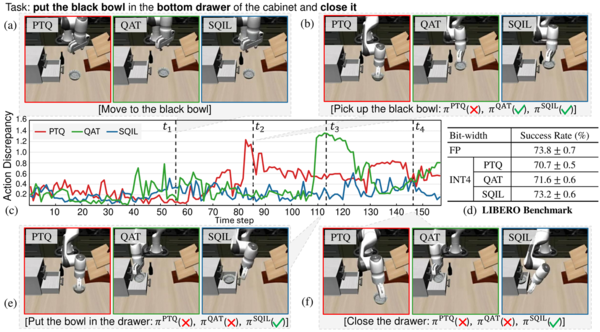
Experimental results showed that SQIL, when applied to a 4-bit quantized robotic control model(OpenVLA), achieved 2.5 times more energy savings and up to 2.5 times faster execution compared to existing methods, while recovering the same success rate as the full-precision model. In an autonomous driving model(CILRS), SQIL delivered a 3.7 times higher speed and 3.1 times more saved energy while maintaining stable driving performance.
Notably, SQIL demonstrated consistent effectiveness not only in simulation but also in real-world experiments using robots, including tests on a UR5 robot and BridgeData V2 replication. This validates the feasibility of deploying quantized large-scale policy models onto battery-powered robots in practice.
Professor Choi emphasized on leading the research, “The result of this research is a technological breakthrough that secures both efficiency and accuracy of VLA models under memory and power constraints of intelligent robots. It will serve as a key driver accelerating the commercialization of Embodied AI.”
The study was supported by the National 해외 토토사이트 운영 Foundation of Korea(NRF) under the Mid-Career 해외 토토사이트 운영er Program, the Innovation 해외 토토사이트 운영 Center Program, and the Institute for Information & Communications Technology Planning & Evaluation(IITP). Also, it has been accepted for presentation at ICCV 2025(International Conference on Computer Vision), one of the world's premier computer vision conferences, on October 19.
The paper Saliency-Aware Quantized Imitation Learning for Efficient Robotic Control was co-authored with Hanyang University doctoral student Park Sung-min as first author and Professor Choi Jung-wook as corresponding author. The 해외 토토사이트 운영 also involved collaboration with Hanyang University Professor Oh Yoon-seon's team and Hyundai Motor Company's 해외 토토사이트 운영 team.
 '한양위키' 키워드 보기
'한양위키' 키워드 보기