在SIGGRAPH Asia 2025发表……可为人类·动物·虚拟生物实现符合其形态的自然运动
汉阳大学(校长 李基正)宣布,计算机软件学部李允尚教授研究团队开发了即使没有动作捕捉数据,也能学习并实现基于肌骨结构角色的自然移动的新型人工智能技术“FreeMusco(Motion-Free Learning of Latent Control for Morphology-Adaptive Locomotion in Musculoskeletal Characters)”。
现有基于物理角色控制的研究大多依赖记录人类动作的动作捕捉数据。这种方式在逼真复现人类动作方面很有效,但对动物或虚拟生物等难以或无法收集运动数据的角色,存在难以适用的局限。
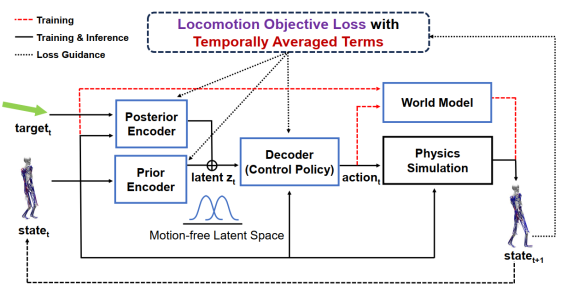
为此,研究团队提出了名为“FreeMusco”的“无运动数据(Motion-Free)”学习框架。该技术将对肌肉与骨骼结构进行精密建模的肌骨仿真本身作为物理先前知识(prior)加以利用,使得在无需额外示范动作或运动数据的情况下,也能让能量效率高、稳定的步行行为在物理约束与生物力学结构的作用下自然形成。其特点在于能够让不同形态(morphology)的角色自发呈现出各不相同的移动策略。
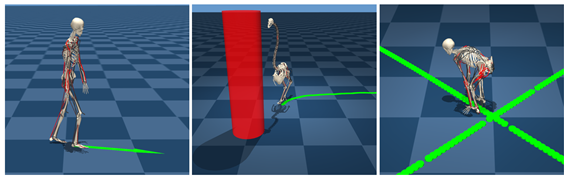
结果显示,人形角色保持了两足步行,而对腿部进行变形的虚拟角色(Chimanoid)则会自发选择利用四肢的四足步行等方式,确认了能够自发形成适配形态且能量效率更高的动作。
此外,研究团队还表明通过同时学习潜在空间(latent space),可将已学习的步行控制扩展到如目标点移动(goal navigation)或路径跟随(path following)等高水准任务,成为无需运动数据的情况下实现肌骨角色控制技术的首个案例。
李允尚教授表示:“FreeMusco并非‘跟随标准答案动作’的方式,而是一种让动作仅凭物理法则与生物力学自发形成的全新方法。该技术有望扩展到动物仿真、游戏与电影中的虚拟生物、机器人控制等各种领域。”
此次研究在于提出了一项可适用于无法进行动作捕捉的角色的通用移动控制技术,因而有望为跨时代机遇物理角色动画与机器人研究提出新方向。
此次研究在韩国研究财团与韩国内容振兴院的支持下进行,研究成果于去年12月15日至18日在香港举行的计算机图形学与交互技术领域世界性学术大会“SIGGRAPH Asia 2025”上被接收并发表。
该论文《FreeMusco: Motion-Free Learning of Latent Control for Morphology-Adaptive Locomotion in Musculoskeletal Characters》,由위너 토토金珉官博士课程学生担任第一作者,李允尚教授担任通讯作者。
 '한양위키' 키워드 보기
'한양위키' 키워드 보기